Message Passing¶
The messaging layer of CAF has three primitives for sending messages: send,
request, and delegate. The former simply enqueues a message to the
mailbox of the receiver. The latter two are discussed in more detail in
Requests and Delegating Messages. Before we go into the details of the message
passing API itself, we first discuss the building blocks that enable message
passing in the first place.
Structure of Mailbox Elements¶
When enqueuing a message to the mailbox of an actor, CAF wraps the content of
the message into a mailbox_element (shown below) to add meta data
and processing paths.
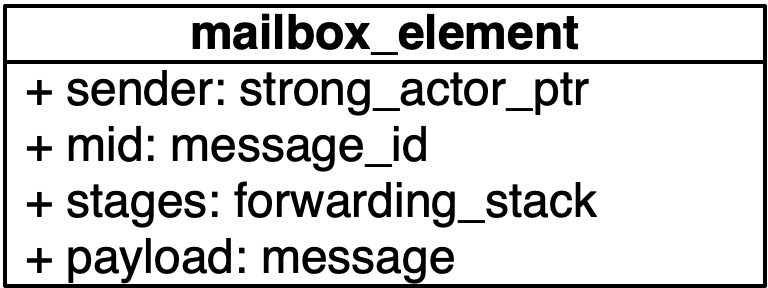
The sender is stored as a strong_actor_ptr (see Pointer) and
denotes the origin of the message. The message ID is either 0—invalid—or a
positive integer value that allows the sender to match a response to its
request. The stages vector stores the path of the message. Response
messages, i.e., the returned values of a message handler, are sent to
stages.back() after calling stages.pop_back(). This allows CAF to build
pipelines of arbitrary size. If no more stage is left, the response reaches the
sender. Finally, payload is the actual content of the message.
Mailbox elements are created by CAF automatically and are usually invisible to the programmer. However, understanding how messages are processed internally helps understanding the behavior of the message passing layer.
Copy on Write¶
CAF allows multiple actors to implicitly share message contents, as long as no actor performs writes. This allows sending the same message to multiple receivers without copying overhead, as long as all receivers only read the content of the message.
Actors copy message contents whenever other actors hold references to it and if one or more arguments of a message handler take a mutable reference.
Requirements for Message Types¶
Message types in CAF must meet the following requirements:
- Inspectable (see Type Inspection)
- Default constructible
- Copy constructible
A type T is inspectable if it provides a free function
inspect(Inspector&, T&) or specializes inspector_access.
Requirement 2 is a consequence of requirement 1, because CAF needs to be able to
create an object for T when deserializing incoming messages. Requirement 3
allows CAF to implement Copy on Write (see Copy on Write).
Default and System Message Handlers¶
CAF has three system-level message types (down_msg, exit_msg, and
error) that all actors should handle regardless of their current state.
Consequently, event-based actors handle such messages in special-purpose message
handlers. Additionally, event-based actors have a fallback handler for unmatched
messages. Note that blocking actors have neither of those special-purpose
handlers (see Blocking Actors).
Down Handler¶
Actors can monitor the lifetime of other actors by calling
self->monitor(other). This will cause the runtime system of CAF to send a
down_msg for other if it dies. Actors drop down messages unless they
provide a custom handler via set_down_handler(f), where f is a function
object with signature void (down_msg&) or
void (scheduled_actor*, down_msg&). The latter signature allows users to
implement down message handlers as free function.
Exit Handler¶
Bidirectional monitoring with a strong lifetime coupling is established by
calling self->link_to(other). This will cause the runtime to send an
exit_msg if either this or other dies. Per default, actors terminate
after receiving an exit_msg unless the exit reason is
exit_reason::normal. This mechanism propagates failure states in an actor
system. Linked actors form a sub system in which an error causes all actors to
fail collectively. Actors can override the default handler via
set_exit_handler(f), where f is a function object with signature
void (exit_message&) or void (scheduled_actor*, exit_message&).
Error Handler¶
Actors send error messages to others by returning an error (see
Errors) from a message handler. Similar to exit messages, error messages
usually cause the receiving actor to terminate, unless a custom handler was
installed via set_error_handler(f), where f is a function object with
signature void (error&) or void (scheduled_actor*, error&).
Additionally, request accepts an error handler as second argument to handle
errors for a particular request (see Error Handling in Requests). The default handler
is used as fallback if request is used without error handler.
Default Handler¶
The default handler is called whenever the behavior of an actor did not match
the input. Actors can change the default handler by calling
set_default_handler. The expected signature of the function object
is result<message> (scheduled_actor*, message_view&), whereas the
self pointer can again be omitted. The default handler can return a
response message or cause the runtime to skip the input message to allow
an actor to handle it in a later state. CAF provides the following built-in
implementations: reflect, reflect_and_quit,
print_and_drop, drop, and skip. The former
two are meant for debugging and testing purposes and allow an actor to simply
return an input. The next two functions drop unexpected messages with or
without printing a warning beforehand. Finally, skip leaves the
input message in the mailbox. The default is print_and_drop.
Note: print_and_drop and drop return an error message that is
delivered to the sender of the unexpected message. If that actor does not have
an explicit handler for error messages it will terminate.
Requests¶
A main feature of CAF is its ability to couple input and output types via the
type system. For example, a typed_actor<result<int32_t>(int32_t)>
essentially behaves like a function. It receives a single int32_t as input
and responds with another int32_t. CAF embraces this functional take on
actors by simply creating response messages from the result of message handlers.
This allows CAF to match request to response messages and to provide a
convenient API for this style of communication.
Sending Requests and Handling Responses¶
Actors send request messages by calling request(receiver, timeout,
content...). This function returns an intermediate object that allows an actor
to set a one-shot handler for the response message. Event-based actors can use
either request(...).then or request(...).await. The former multiplexes
the one-shot handler with the regular actor behavior and handles requests as
they arrive. The latter suspends the regular actor behavior until all awaited
responses arrive and handles requests in LIFO order. Blocking actors always use
request(...).receive, which blocks until the one-shot handler was called.
Actors receive a sec::request_timeout (see Default Error Codes) error message (see
Error Handler) if a timeout occurs. Users can set the timeout to
infinite for unbound operations. This is only recommended if the receiver is
known to run locally.
In our following example, we use the simple cell actor shown below as communication endpoint.
using cell
= typed_actor<result<void>(put_atom, int32_t), // 'put' writes to the cell
result<int32_t>(get_atom)>; // 'get 'reads from the cell
struct cell_state {
static constexpr inline const char* name = "cell";
cell::pointer self;
int32_t value;
cell_state(cell::pointer ptr, int32_t val) : self(ptr), value(val) {
// nop
}
cell_state(const cell_state&) = delete;
cell_state& operator=(const cell_state&) = delete;
cell::behavior_type make_behavior() {
return {
[=](put_atom, int32_t val) { value = val; },
[=](get_atom) { return value; },
};
}
};
using cell_impl = cell::stateful_impl<cell_state>;
To showcase the slight differences in API and processing order, we implement three testee actors that all operate on a list of cell actors.
void waiting_testee(event_based_actor* self, vector<cell> cells) {
for (auto& x : cells)
self->request(x, seconds(1), get_atom_v).await([=](int32_t y) {
aout(self) << "cell #" << x.id() << " -> " << y << endl;
});
}
void multiplexed_testee(event_based_actor* self, vector<cell> cells) {
for (auto& x : cells)
self->request(x, seconds(1), get_atom_v).then([=](int32_t y) {
aout(self) << "cell #" << x.id() << " -> " << y << endl;
});
}
void blocking_testee(blocking_actor* self, vector<cell> cells) {
for (auto& x : cells)
self->request(x, seconds(1), get_atom_v)
.receive(
[&](int32_t y) {
aout(self) << "cell #" << x.id() << " -> " << y << endl;
},
[&](error& err) {
aout(self) << "cell #" << x.id() << " -> " << to_string(err) << endl;
});
}
Our caf_main for the examples spawns five cells and assign the initial
values 0, 1, 4, 9, and 16. Then it spawns one instance for each of our testee
implementations and we can observe the different outputs.
Our waiting_testee actor will always print:
cell #9 -> 16
cell #8 -> 9
cell #7 -> 4
cell #6 -> 1
cell #5 -> 0
This is because await puts the one-shots handlers onto a stack and
enforces LIFO order by re-ordering incoming response messages as necessary.
The multiplexed_testee implementation does not print its results in
a predicable order. Response messages arrive in arbitrary order and are handled
immediately.
Finally, the blocking_testee has a deterministic output again. This is
because it blocks on each request until receiving the result before making the
next request.
cell #5 -> 0
cell #6 -> 1
cell #7 -> 4
cell #8 -> 9
cell #9 -> 16
Both event-based approaches send all requests, install a series of one-shot handlers, and then return from the implementing function. In contrast, the blocking function waits for a response before sending another request.
Sending Multiple Requests¶
Sending the same message to a group of workers is a common work flow in actor
applications. Usually, a manager maintains a set of workers. On request, the
manager fans-out the request to all of its workers and then collects the
results. The function fan_out_request combined with the merge policy
select_all streamlines this exact use case.
In the following snippet, we have a matrix actor self that stores worker
actors for each cell (each simply storing an integer). For computing the average
over a row, we use fan_out_request. The result handler passed to then
now gets called only once with a vector holding all collected results. Using
a response promise promise further allows us to delay responding to the client
until we have collected all worker results.
[=](get_atom get, average_atom, column_atom, int column) {
assert(column < columns);
std::vector<cell> columns;
columns.reserve(rows);
auto& rows_vec = self->state.rows;
for (int row = 0; row < rows; ++row)
columns.emplace_back(rows_vec[row][column]);
auto rp = self->make_response_promise<double>();
self->fan_out_request<policy::select_all>(columns, infinite, get)
.then(
[=](std::vector<int> xs) mutable {
assert(xs.size() == static_cast<size_t>(rows));
rp.deliver(std::accumulate(xs.begin(), xs.end(), 0.0) / rows);
},
[=](error& err) mutable { rp.deliver(std::move(err)); });
return rp;
},
The policy select_any models a second common use case: sending a
request to multiple receivers but only caring for the first arriving response.
Error Handling in Requests¶
Requests allow CAF to unambiguously correlate request and response messages.
This is also true if the response is an error message. Hence, CAF allows to add
an error handler as optional second parameter to then and await (this
parameter is mandatory for receive). If no such handler is defined, the
default error handler (see Error Handler) is used as a fallback in
scheduled actors.
As an example, we consider a simple divider that returns an error on a division by zero. This examples uses a custom error category (see Errors).
using divider = typed_actor<result<double>(div_atom, double, double)>;
divider::behavior_type divider_impl() {
return {
[](div_atom, double x, double y) -> result<double> {
if (y == 0.0)
return math_error::division_by_zero;
return x / y;
},
};
}
When sending requests to the divider, we can use a custom error handlers to report errors to the user like this:
auto div = system.spawn(divider_impl);
scoped_actor self{system};
self->request(div, std::chrono::seconds(10), div_atom_v, x, y)
.receive(
[&](double z) { aout(self) << x << " / " << y << " = " << z << endl; },
[&](const error& err) {
aout(self) << "*** cannot compute " << x << " / " << y << " => "
<< to_string(err) << endl;
});
Delaying Messages¶
Messages can be delayed by using the function delayed_send, as illustrated
in the following time-based loop example.
// uses a message-based loop to iterate over all animation steps
behavior dancing_kirby(event_based_actor* self) {
using namespace std::literals::chrono_literals;
// let's get it started
self->send(self, update_atom_v, size_t{0});
return {
[=](update_atom, size_t step) {
if (step == sizeof(animation_step)) {
// we've printed all animation steps (done)
cout << endl;
self->quit();
return;
}
// print given step
draw_kirby(animation_steps[step]);
// schedule next animation step
self->delayed_send(self, 150ms, update_atom_v, step + 1);
},
};
}
Delayed send schedules messages based on relative timeouts. For absolute
timeouts, use scheduled_send instead.
Delegating Messages¶
Actors can transfer responsibility for a request by using delegate.
This enables the receiver of the delegated message to reply as usual—simply
by returning a value from its message handler—and the original sender of the
message will receive the response. The following diagram illustrates request
delegation from actor B to actor C.
A B C
| | |
| ---(request)---> | |
| | ---(delegate)--> |
| X |---\
| | | compute
| | | result
| |<--/
| <-------------(reply)-------------- |
| X
X
Returning the result of delegate(...) from a message handler, as
shown in the example below, suppresses the implicit response message and allows
the compiler to check the result type when using statically typed actors.
using adder_actor = typed_actor<result<int32_t>(add_atom, int32_t, int32_t)>;
adder_actor::behavior_type worker_impl() {
return {
[](add_atom, int32_t x, int32_t y) { return x + y; },
};
}
adder_actor::behavior_type server_impl(adder_actor::pointer self,
adder_actor worker) {
return {
[=](add_atom add, int32_t x, int32_t y) {
return self->delegate(worker, add, x, y);
},
};
}
void client_impl(event_based_actor* self, adder_actor adder, int32_t x,
int32_t y) {
using namespace std::literals::chrono_literals;
self->request(adder, 10s, add_atom_v, x, y).then([=](int32_t result) {
aout(self) << x << " + " << y << " = " << result << std::endl;
});
}
void caf_main(actor_system& sys) {
auto worker = sys.spawn(worker_impl);
auto server = sys.spawn(server_impl, sys.spawn(worker_impl));
sys.spawn(client_impl, server, 1, 2);
}
Response Promises¶
Response promises allow an actor to send and receive other messages prior to
replying to a particular request. Actors create a response promise using
self->make_response_promise<Ts...>(), where Ts is a
template parameter pack describing the promised return type. Dynamically typed
actors simply call self->make_response_promise(). After retrieving
a promise, an actor can fulfill it by calling the member function
deliver(...), as shown in the following example.
using adder_actor = typed_actor<result<int32_t>(add_atom, int32_t, int32_t)>;
adder_actor::behavior_type worker_impl() {
return {
[](add_atom, int32_t x, int32_t y) { return x + y; },
};
}
adder_actor::behavior_type server_impl(adder_actor::pointer self,
adder_actor worker) {
return {
[=](add_atom, int32_t y, int32_t z) {
auto rp = self->make_response_promise<int32_t>();
self->request(worker, infinite, add_atom_v, y, z)
.then([rp](int32_t result) mutable { rp.deliver(result); },
[rp](error& err) mutable { rp.deliver(std::move(err)); });
return rp;
},
};
}
void client_impl(event_based_actor* self, adder_actor adder, int32_t x,
int32_t y) {
using namespace std::literals::chrono_literals;
self->request(adder, 10s, add_atom_v, x, y).then([=](int32_t result) {
aout(self) << x << " + " << y << " = " << result << std::endl;
});
}
void caf_main(actor_system& sys) {
auto worker = sys.spawn(worker_impl);
auto server = sys.spawn(server_impl, sys.spawn(worker_impl));
sys.spawn(client_impl, server, 1, 2);
}
This example is almost identical to the example for delegating messages. However, there is a big difference in the flow of messages. In our first version, the worker (C) directly responded to the client (A). This time, the worker sends the result to the server (B), which then fulfills the promise and thereby sends the result to the client:
A B C
| | |
| ---(request)---> | |
| | ---(request)---> |
| | |---\
| | | | compute
| | | | result
| | |<--/
| | <----(reply)---- |
| | X
| <----(reply)---- |
| X
X
Message Priorities¶
By default, all messages have the default priority, i.e.,
message_priority::normal. Actors can send urgent messages by setting the
priority explicitly: send<message_priority::high>(dst, ...). Urgent messages
are put into a different queue of the receiver’s mailbox. Hence, long wait
delays can be avoided for urgent communication.